Before moving on to fully three dimensional mazes, let's start with printing a 2D maze. I decided to model the maze in Blender using the scripting language so that I could make arbitrarily large and complex mazes later.
ASCII Art maze:

Those 'W' become little cubes to make the walls. Then we add a floor and a ceiling. And finally a couple of curved walls at the exits to avoid losing the ball (after losing a couple...).

Blender script is not entirely obvious when it comes to Boolean operations. Here is what it looks like to subtract a cylinder from another one in Blender 2.73a. This is one step towards building the little walls at he exits. Note the bolded line, which is a bit unintuitive since other operations only require setting 'selected', not 'active'.
# One Cylinder
bpy.ops.mesh.primitive_cylinder_add(
radius=1, depth=0.5, location=(0,0,0))
cyl1 = bpy.context.object
# Another one, smaller in radius but taller
bpy.ops.mesh.primitive_cylinder_add(
radius=0.8, depth=1.0, location=(0,0,0))
cyl2 = bpy.context.object
# Add a diff modifier
diff1 = cyl1.modifiers.new('Diff1', 'BOOLEAN')
diff1.object = cyl2
diff1.operation = 'DIFFERENCE'
# Apply the modifier and get rid of the extra object.
bpy.context.scene.objects.active = cyl1
bpy.ops.object.modifier_apply(apply_as='DATA', modifier="Diff1")
scene.objects.unlink(cyl2)
And here is the result! It is quite fun to play with. Showing the internal structure on top makes it challenging but not overly difficult.
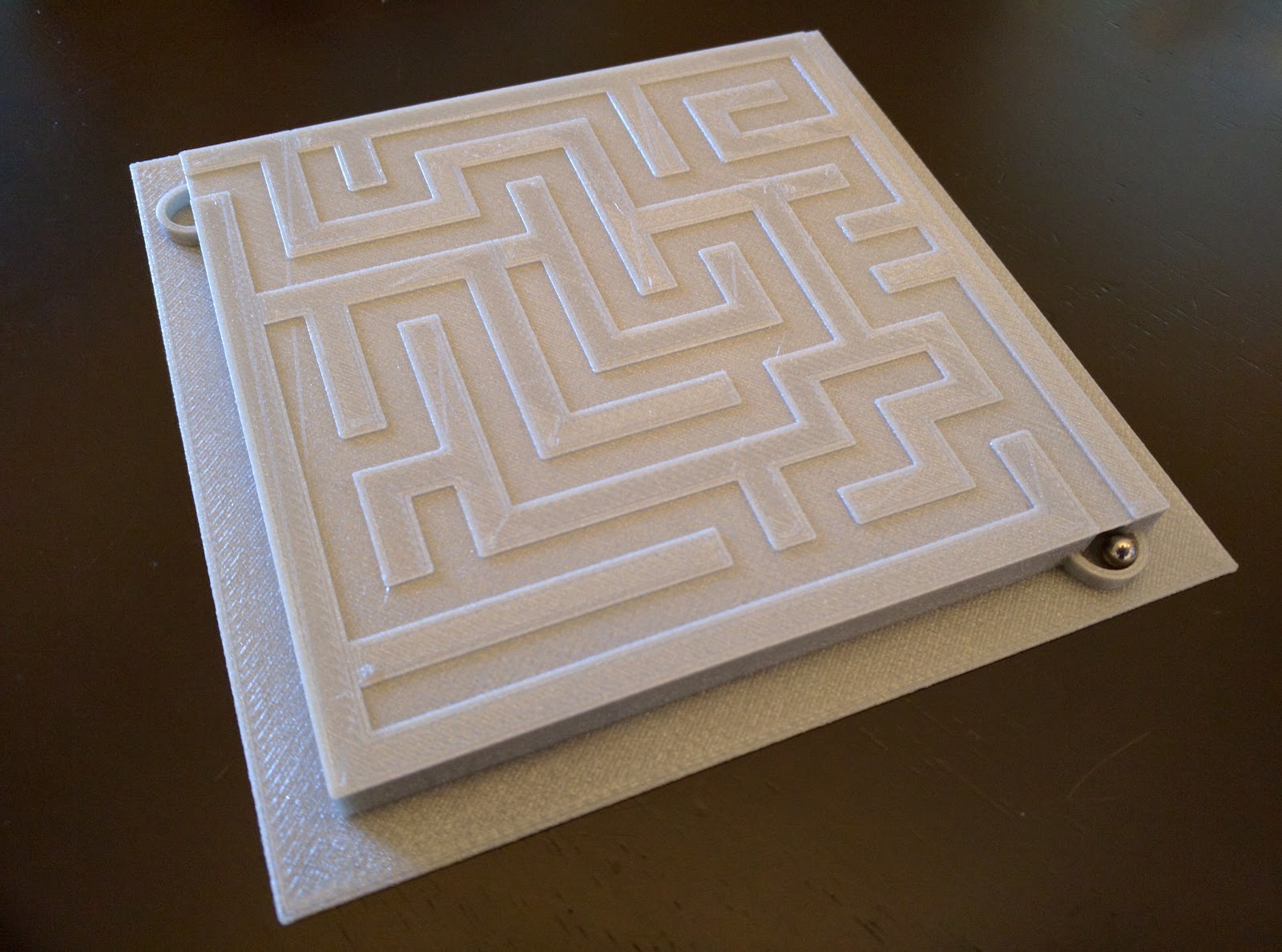
Next step: a real 3D maze...











{kind=link}